Fusionのスケッチで、数式からスプラインカーブを生成するアドイン「CurveGenerator」を前回紹介しました。今回は、「CurveGenerator」をインボリュート歯車のモデリングに使った例を紹介します。
結果
ラックの歯先丸みを考慮する場合としない場合の2回に分けて説明します。
ラックの歯先丸み0の場合
下図はギヤ作図アドイン「igears」で描いた歯数6,10,15,20のインボリュート歯車の正面図上に、「CurveGenerator」で作図した式A:インボリュート曲線、式B:トロコイド曲線を重ね書きしたものです。両者は完全に一致しています。
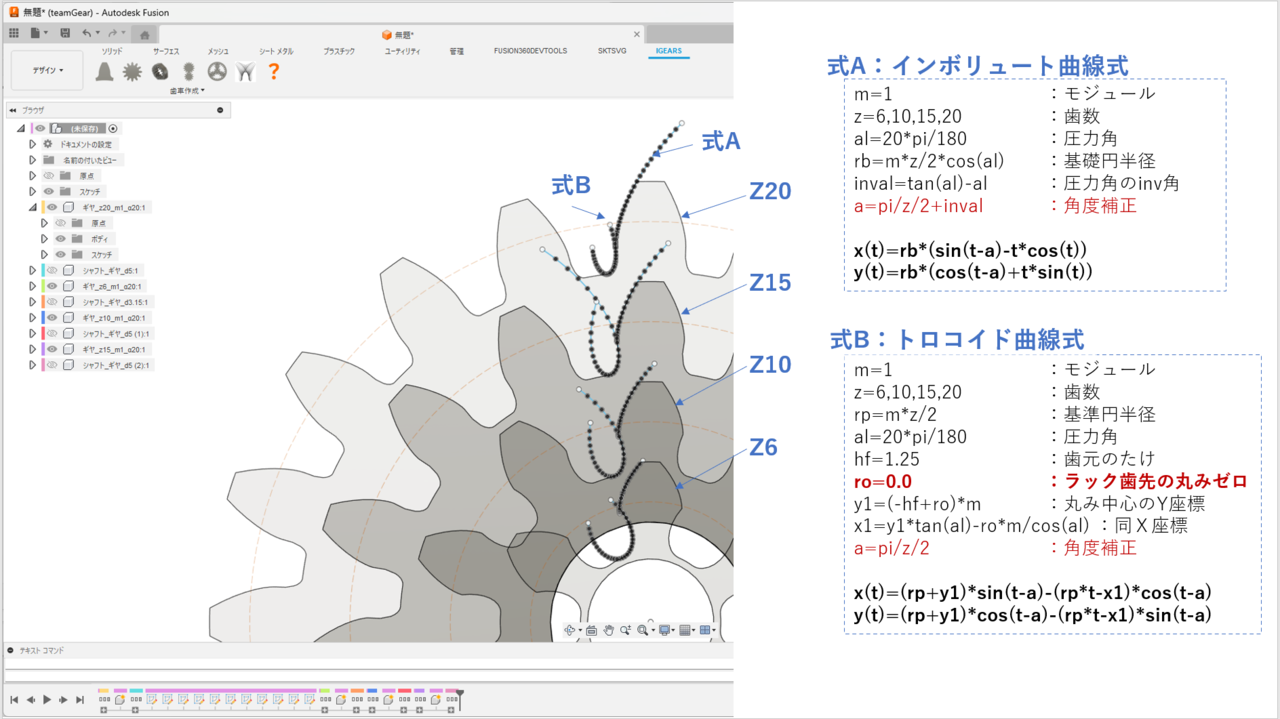
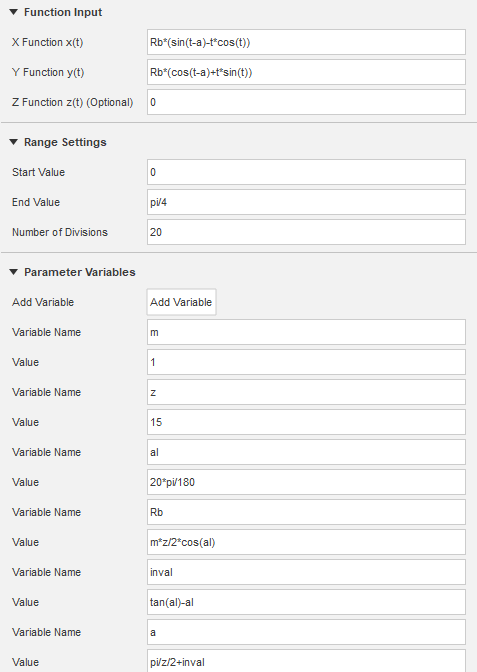
インボリュート計算式
- m=1 :モジュール
- z=6,10,15,20 :歯数
- al=20*pi/180 :圧力角
- rb=m*z/2*cos(al) :基礎円半径
- inval=tan(al)-al :圧力角のinv角
- a=pi/z/2+inval :角度補正
- x(t)=rb*(sin(t-a)-t*cos(t))
- y(t)=rb*(cos(t-a)+t*sin(t))
-
- 角度補正:
歯形中心が角度t=0となるための補正量
「CurveGenerator」のダイアログに、次のように入力します。
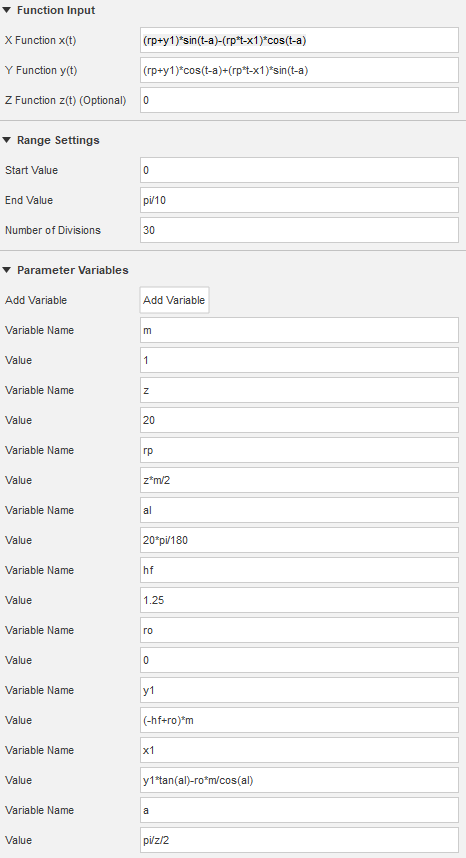
トロコイド計算式
- m=1 :モジュール
- z=6,10,15,20 :歯数
- rp=m*z/2 :基準円半径
- al=20*pi/180 :圧力角
- hf=1.25 :歯元のたけ
- ro=0.0 :ラック歯先の丸みゼロ
- y1=(-hf+ro)*m :丸み中心のY座標
- x1=y1*tan(al)-ro*m/cos(al) :同Ⅹ座標
- a=pi/z/2 :角度補正
- x(t)=(rp+y1)*sin(t-a)-(rp*t-x1)*cos(t-a)
- y(t)=(rp+y1)*cos(t-a)-(rp*t-x1)*sin(t-a)
-
- 角度補正:
歯形中心が角度t=0となるための補正量
「CurveGenerator」のダイアログに、次のように入力します。
ラックの歯先丸みを考慮した場合は、別途アップします。