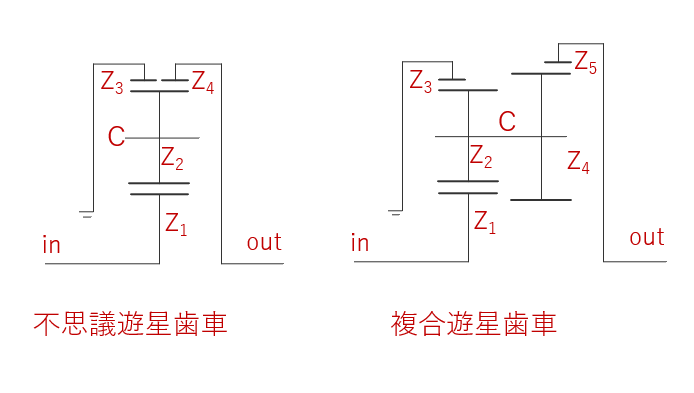
先回の「不思議遊星歯車」はピニオンとサンギヤ1セットに歯数違いのリングギヤが2個から成っています。この形、つまり1つの歯車に2つの歯数違いの歯車を同じ中心距離で組み合わせた機構には「mechanical paradox」という名前が付きます。
それによく似ているのですが、2個のリングギヤにそれぞれ異なる歯数のピニオンを組み合わせるタイプもあります(図1右)。こっちも大減速比を得られるのですが、「不思議遊星歯車」ではなく、「3K型複合遊星歯車」と言うようです。(3Kとは遊星歯車の分類方法の一つで、他に2K-H等あり)。だからタイトルは正しくないかもしれませんが、同じカテゴリーなので、このままいきます。
今回はその機構の紹介です。
速度比の求め方(のり付け法)
いままでは、速度比を求める方法として「速度線図法」を使ってきました。今回の機構にそれをあてはめると「ピニオン回転」をどう扱ったらいいのか悩みます。そこで、今度は「のり付け法」でやってみようと思います。
「のり付け法」の練習
通常のシングルピニオンプラネタリを例にします。
リングギヤ(歯数Zr)固定、サンギヤ(Zs)入力、キャリヤ(Zc)出力の時の速度比Nc/Nsは次のようにして求めます。
キャリヤを固定して、入力要素であるサンギヤを1回転させたとき、リングギヤの回転数Nrを求めます。
答えはNr=-Zs/Zr×1です。これを表にして
| S | C | R | |
| C固定 | 1 | 0 | -Zs/Zr×1 |
ただし、S:サンギヤ、C:キャリヤ、R:リングギヤとします
リングギヤ固定にするために、全体に対してリングギヤ回転相当の逆回転を与える
リングギヤの回転速度は-Zs/Zrですから、これをゼロにするためには、Zs/Zrを加える必要があります。ただし、この回転はリングギヤだけではなく、サンギヤ、キャリヤにも与えます。つまり、全体を回転させます。
| S | C | R | |
| C固定 | 1 | 0 | -Zs/Zr×1 |
| 全体をZs/Zr回転 | Zs/Zr | Zs/Zr | Zs/Zr |
4行目を作成して、2,3行の和を求めます。
| S | C | R | |
| C固定 | 1 | 0 | -Zs/Zr×1 |
| 全体をZs/Zr回転 | Zs/Zr | Zs/Zr | Zs/Zr |
| 和 | 1+Zs/Zr | Zs/Zr | 0 |
これで望みの状態(リング速度0)になりました。
速度比は出力回転を入力回転で除算
4行目において
入力:サンギヤ1+Zs/Zr
出力:キャリヤZs/Zr
ですから、次の結果を得ます。
出力/入力=Zs/Zr/(1+Zs/Zr)=Zs/Zr/((Zr+Zs)/Zr)=Zs/(Zr+Zs)
減速比はこの逆数です。
また、Zs/Zr=ρとすれば
出力/入力=Zs/(Zr+Zs)=1/(1+ρ)
∴
減速比は1+ρです。
「のり付け」というのは、全体を一体化=のり付けして回転させることです。その意図は、特定の要素の回転を打ち消すために全体回転を与えることで、その要素が固定されていることを表現するのです。そうすると残りの入力と出力から速度比を導くことができます。全体が一体で回転していても、要素間の相対関係は一定ですから。
適用
図1右側の機構でやってみます。
キャリヤ固定
| Z1 | Z2 | Z3 | Z4 | Z5 | C | |
| C固定 | 1 | -Z1/Z2 | -Z1/Z3 | -Z1/Z2 | -Z1/Z2*Z4/Z5 | 0 |
Z3の逆回転を全体に与えます
| Z1 | Z2 | Z3 | Z4 | Z5 | C | |
| C固定 | 1 | -Z1/Z2 | -Z1/Z3 | -Z1/Z2 | -Z1/Z2*Z4/Z5 | 0 |
| Z3の逆回転 | Z1/Z3 | Z1/Z3 | Z1/Z3 | Z1/Z3 | Z1/Z3 | Z1/Z3 |
和を求めます
| Z1 | Z2 | Z3 | Z4 | Z5 | C | |
| C固定 | 1 | -Z1/Z2 | -Z1/Z3 | -Z1/Z2 | -Z1/Z2*Z4/Z5 | 0 |
| Z3の逆回転 | Z1/Z3 | Z1/Z3 | Z1/Z3 | Z1/Z3 | Z1/Z3 | Z1/Z3 |
| 和 | 1+Z1/Z3 | -Z1/Z2+Z1/Z3 | 0 | -Z1/Z2+Z1/Z3 | -Z1/Z2*Z4/Z5+Z1/Z3 | Z1/Z3 |
速度比
Z1入力、Z5出力なので、Z1の速度をN1、Z5の速度をN5とすれば、速度比は次式となります。
N5/N1=(-Z1/Z2*Z4/Z5+Z1/Z3)/(1+Z1/Z3)
ここで
分子:
(-Z1/Z2*Z4/Z5+Z1/Z3)=-Z1*Z4/(Z2*Z5)+Z1/Z3=(-Z1*Z3*Z4+Z1*Z2*Z5)/(Z2*Z3*Z5)
分母:
(1+Z1/Z3)=(Z1+Z3)/Z3
よって
N1/N5=(-Z1*Z3*Z4+Z1*Z2*Z5)/(Z2*Z3*Z5)/((Z1+Z3)/Z3)
=(-Z1*Z3*Z4+Z1*Z2*Z5)/(Z1+Z3)/(Z2*Z5)
=Z1/(Z2*Z5) * (-Z3*Z4+Z2*Z5)/(Z1+Z3)
減速比i
i=N5/N1=(Z2*Z5)*(Z1+Z3)/(Z1* (-Z3*Z4+Z2*Z5))・・・(1)
検算
以下のURL記載の歯数を当てはめてみます。
「移動体向け小型・大減速バイラテラルギヤの開発」三菱重工技報 Vol.59 No.1(2022)
www.mhi.co.jp/technology/review/pdf/591/591070.pdf
| 太陽歯車 | 遊星歯車1 | 固定内歯車 | 遊星歯車2 | 出力内歯車 | |
| 歯数 | 23 | 47 | 117 | 35 | 105 |
論文によると、減速比iは35.8です。
(1)式に代入すると
>>> Z1=23
>>> Z2=47
>>> Z3=117
>>> Z4=35
>>> Z5=105
>>> (Z2*Z5)*(Z1+Z3)/(Z1* (-Z3*Z4+Z2*Z5))
35.76086956521739となるので、合っていますね。
別解
歯数ではなく歯数比ρを使って解くと、ちょっとすっきりします。
キャリヤ固定
| Z1 | Z2 | Z3 | Z4 | Z5 | C | |
| C固定 | 1 | -Z1/Z2 | -Z1/Z3 | -Z1/Z2 | -Z1/Z2*Z4/Z5 | 0 |
において
ρ1=Z1/Z3
ρ2=Z1/Z2*Z4/Z5
とすれば
| Z1 | Z2 | Z3 | Z4 | Z5 | C | |
| C固定 | 1 | -Z1/Z2 | -ρ1 | -Z1/Z2 | -ρ2 | 0 |
| ρ1で全体回転 | ρ1 | ρ1 | ρ1 | ρ1 | ρ1 | ρ1 |
| 和 | 1+ρ1 | - | 0 | - | ρ1-ρ2 | - |
(-:減速比算出に不要なので省略)
したがって減速比iは
i=(1+ρ1)/(ρ1-ρ2)
です。
前述の文献の歯数を入力すると、以下のように35.8を得ます。
>>> ro1=Z1/Z3
>>> ro2=Z1/Z2*Z4/Z5
>>> (1+ro1)/(ro1-ro2)
35.76086956521738この式の分子は、練習問題でやったリング固定、サンギヤ入力、キャリヤ出力の減速比で、分母はρ1とρ2の差です。
よって、この機構はZ1入力,Z2出力,Z3固定から成る1列目の遊星歯車のキャリヤ出力を、(ρ1-ρ2)で除算していることになるので、(ρ1-ρ2)が0に近いと減速比は大となります。このあたりは、不思議遊星歯車の「内歯車の歯数差が小さいほど減速比大」と同じイメージに感じます。
以上です。