はじめに
今回は、「不思議遊星歯車」と呼ばれる機構の紹介です。この機構は英語で「Mechanical Paradox Planetary Gear」と呼ばれ、元々は考案者の名前の付いた「Furgason's Mechanical Paradox」というアイデアに基づいています。
これから紹介するのは2つあって、1つ目は「遊星微動ダイアル機構」、2つ目は「不思議遊星歯車機構」です。

2つの機構で共通なのは、歯数の異なる2つの歯車が、1つの歯車と中心距離が同一でかみ合っていることです。昔は隙間を広げてかみ合わせていたそうですが、今なら転位歯車で、厳密にかみ合わせることができます。
「遊星微動ダイアル機構」
1つ目の機構は名称から想像できると思いますが、ダイアル回転を大きく減速(この例では減速比22)することで微動出力を得ます。
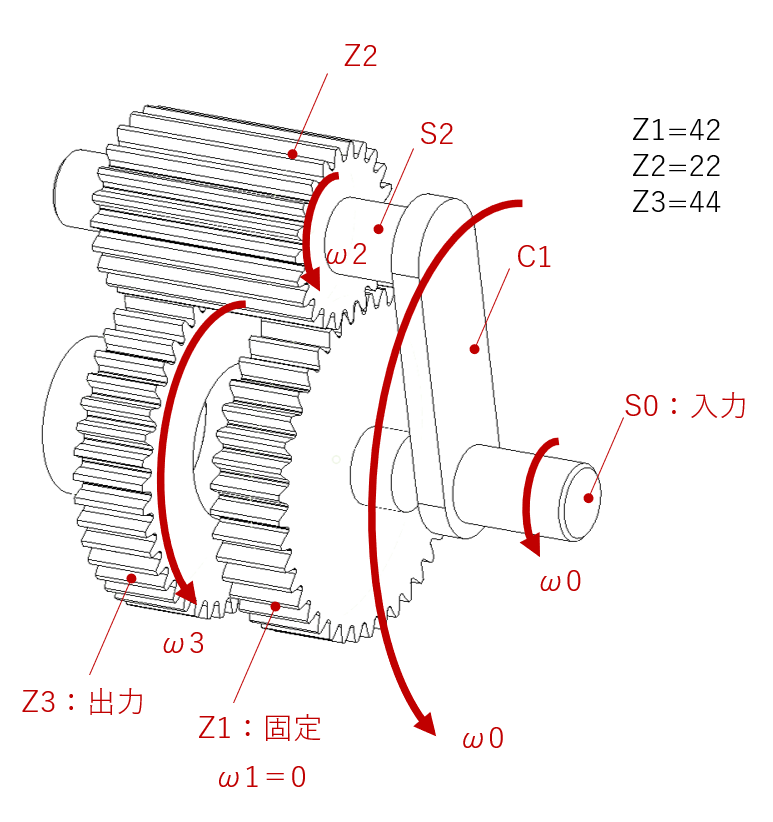
構造は、下図に示すようにS1入力、Z2ギヤ固定、Z3ギヤ出力となっています。ここで各歯数はZ1=22(入力),Z2=42(固定),Z3=44(出力)です。
ちなみに小原歯車工業様の「内歯車」カタログP2に減速比60の例が載っています。
https://www.khkgears.co.jp/catalogs/pdf/internal_gears.pdf
歯車諸元の例
モジュール1の時、Z1とZ2の標準中心距離は32、Z1とZ3歯車の標準中心距離は33ですが、同一軸に取り付けるために、32.5に合わせたときの転位歯車諸元を下表に示します。

大きな減速比の理由
S1シャフトを回転させると、C1アームが回転し、S2シャフトがS1軸周りを公転運動します。S2シャフトに支持されたZ2ギヤも公転運動しますが、Z1ギヤが固定されているため、Z1歯(42)相当の自転運動をZ2ギヤに生じます。Z2の自転と公転はZ3ギヤを回転させますが、仮にZ3の歯数がZ1と同じならばZ3は静止します。しかし、Z1,Z3は2歯違いのため静止できず、歯数差分だけ余計に回転せざるを得ません。S1シャフトが1回転すると歯数の差(Z3-Z1)=2歯ずれていくので、Z3の歯数44のうち2歯、つまり2/44回転します。これが速度比なので、減速比は44/2=22です。式で表すと減速比i=ω1/ω3=Z3/(Z3-Z1)。この仕組みで大きな減速比を得られます。
AUTODESK Fusionによるアニメーションを図4に示します。
入力回転に比べて、出力回転が大きく減速されています。
速度線図
減速比を視覚的に理解するには、こちらの「ラビニヨ方式遊星歯車の変速比の算出法 - 歯車のハナシ」で紹介した速度線図法がいいでしょう。
下図の速度線図において、キャリヤ入力回転と、サンギヤ1(Z2)、サンギヤ2(Z3)の回転速度は1本の直線上にプロットされます。入力回転とサンギヤ1の回転速度が既知なので、線形関係からサンギヤ2(Z4)の回転速度が求められます。なお横軸は各歯数の逆数(ただしキャリヤ固定時の回転方向により正負号あり)で、縦軸は入力を1とした回転速度です。

この線図を見ると、出力サンギヤ2(Z44)の位置が、固定サンギヤ1(Z42)に近いほど、回転速度が小さい、つまり減速比が大きくなることがよくわかります。
計算式は、直線の傾きと底辺の長さを乗じることで求めるか、または2つの相似三角形の高さの比として求めます。
x:1/Z1-1/Z3=1:1/Z1
x=(Z3-Z1)/Z1Z3*Z1=(Z3-Z1)/Z3
「不思議遊星歯車機構」
2つ目は、さらに大減速比(100~400)を得られる機構です。
下図の遊星歯車機構は、歯数が異なる2個の内歯車(z3,z4)に共通のピニオンz2がかみ合っていて、z3を固定し、サンギヤz1入力、z4出力とした場合に大減速比が得られます。この機構のことを「不思議遊星歯車」といいます。z1=15,z2=23,z3=60,z4=63の組み合わせ例では、減速比105を得ます。

こちらも、異なる歯数の内歯車が、同じ軸間距離でピニオンとかみ合っているのは、転位で調整しているからです。
アニメーション
下図にAUTODESK Fusionによるアニメーションを示します。サンプリングの都合で、サンギヤの回転数がゆっくりに見えますが、実は高速で回転しています。一方でリングギヤz3が停止して、z4は微速で回転しているのは、先ほどの「遊星微動ダイアル機構」と同じですが、減速比がより大きな105になっています。

減速比の算出
こちらも速度線図を書いてみると下図のようになります。横軸は歯数の逆数、縦軸は入力を1とした回転数です。入力要素(サンギヤ歯数15なので横軸1/15の位置)と固定要素(リングギヤz3=60なので逆数は1/60だが、キャリヤ固定時にサンギヤとは回転方向が逆なので、-1/60とする)、出力要素(リングギヤz4=63なので、逆数は1/63だが、回転方向逆なので-1/63位置)の3軸の回転速度は、1本の直線上にあります。


この機構は、横軸-1/Z3位置での回転数はゼロですが、-1/Z4の位置が-1/Z3に極めて近いため、大きな減速比が得られる仕組みです。歯数差がゼロに近いほど減速比が大きくなるのですが、ピニオンをn個等配置するには、2つのリングギヤに最低でもn歯の歯数差が必要となります。
歯車諸元
中心距離が同一で歯数差をつけるため転位設計するのですが、3歯差ともなるとその転位係数の和は1.5程度の大きさです。
今回の歯数例( z1=15,z2=23,z3=60,z4=63)
この歯数組み合わせは、「歯車とその検査 」(中田孝、オーム社、1956)に記載のものです。中心距離を19.5に統一し、Z4の転位係数を0にするという条件で残りの転位係数を算出していく過程が書かれています。
下表にモジュール1としたときの諸元表を記載します。

この歯数の組み合わせは、遊星歯車の同軸条件(Z1+2Z2=Z3)を満たしていませんが、転位歯車を使って中心距離を合わせるので、問題なく同軸になります。
その他の歯数例
一般的には遊星不思議歯車でも、同軸条件を満たすように設計する例や、2つのリングギヤを3 の倍数歯数に設定するケースが多いようです。
| Z1 | Z2 | Z3 | Z4 | 減速比 | |
| 1 | 20 | 31 | 82 | 85 | 144.5 |
| 2 | 24 | 25 | 72 | 75 | 100 |
| 3 | 18 | 21 | 57 | 60 | 83.33 |
| 4 | 12 | 47 | 105 | 108 | 351 |
用途
この機構の用途は、ロボットのサーボドライブ機構の減速機、宇宙ステーションのマニピュレータなどが以下の文献で挙げられています。
「不思議遊星歯車機構の減速機(機械学会誌1997.9 Vol100 No.946)」
続きがあります。
involutegearsoft.hatenablog.com
ご参考:速度線図のスタイル
今回の速度線図は、私自身が見慣れた従来のスタイル(横軸に数値を書かずに要素名を書く)とはちょっと違います。というのもchatGPT 4にプロンプトを投げて作ってもらったからです。chatGPTは計算が苦手で、符号間違いや分子分母が逆などの些細なミスをよく生じます。それを指摘、修正しながら、正解へと導いているのですが、今後うまい方法が見つかれば紹介しようと思います。