経緯
「不等配遊星歯車のモデル化」では、Fusion360の「モーションスタディ」を使って、ピニオンの位置決めを行いました。この方法だと、ピニオンの回転角を計算することなく配置できるところがメリットです。
ここでは、モーションスタディを使わないオーソドックスな遊星配置と位相合わせの方法を紹介します。
筆者の別HP記事「かみ合い位相の合わせ方」もご覧ください。
準備
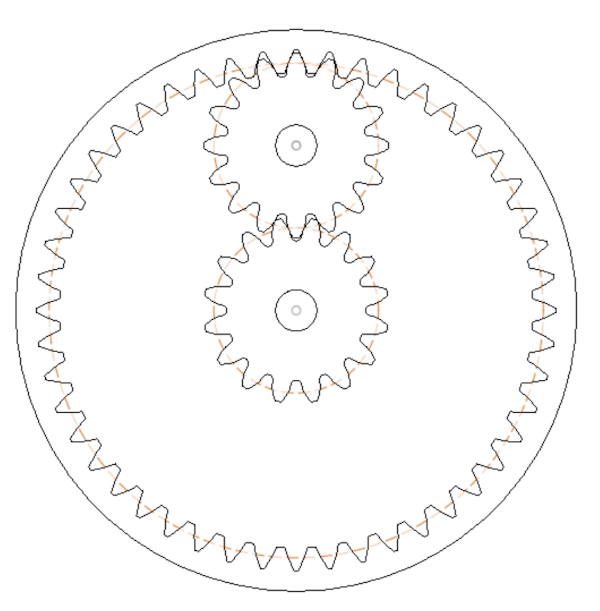
リングギヤ、サンギヤ、ピニオン1個のモデルを準備します。
入力諸元
igears2を使う場合の入力諸元は、タミヤの遊星モデル を使う場合
- リングギヤ歯数48
- サンギヤ歯数16
- ピニオン歯数16
- ピニオン個数1
- モジュール0.5
- 圧力角23°
とし、「OK」クリックするとピニオン1個のモデルが作成されます。2個目以降のピニオンは、自力で自転と公転角度を計算して配置していきます。
配置角の検討
「タミヤ遊星ギヤモデルを買ってみました(1)」で次のようなことを書きました。
bタイプ(Zs16,Zp16,Zr48,N3)は、遊星歯車の等配条件を満足しないため、3個のピニオンの配置が円周等分できない。
これに対して、考えられる対策は
ピニオンを不等配、つまり3個のピニオンを120°間隔でなく、「最小かみ合い角度LMS」の整数倍に設定する。「最小かみ合い角度」とは「LMS:Least Mesh Angle」とも言い、360/(サンギヤ歯数+リングギヤ歯数)である。bタイプの場合、LMSは360/(16+48)=5.625となる。360/3=120を5.625で割ると21.333...なので、いったん21×5.625で配置し、余った1をどこかに配置する。つまりピニオン3個中2個は21×5.625=118.125間隔で残り1個は22×5.625=123.75に配置する。実物のピニオン角度をラフ測定すると、20×5.625=112.5°と24×5.625=135°に該当します。なぜ整数倍の組み合わせが均等に近い21と22でなく、20と24なのかはよくわかりません。
この時の疑問点も踏まえて、配置候補として次の2仕様を計算します。
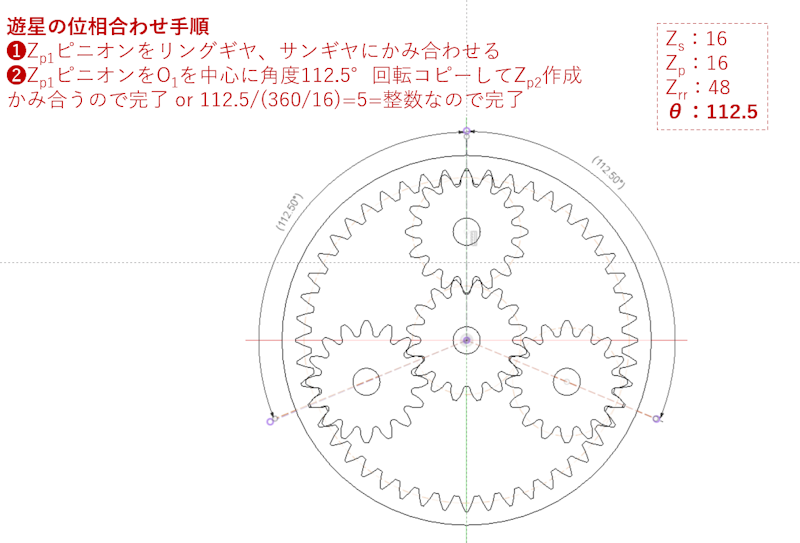
(a) 配置角112.5,112.5,135:タミヤモデル
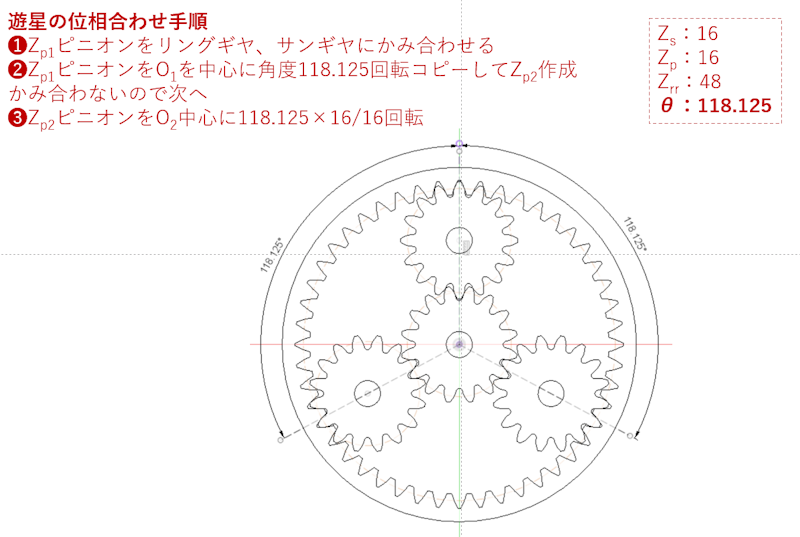
(b) 配置角118.125,118.125,123.75:配置角違いモデル(ばらつきが小さい)
遊星歯車の位相合わせ方法
筆者の使っている方法です。歯車作成アドインの遊星歯車モジュールでも使用しています。
遊星の位相合わせ手順
この手順は、ピニオンの公転運動と自転運動を別々に考えます。また、上図でピニオンをZp1,Zp2に配置することと、Zp1がZp2に回転移動することは同じことを指していると考えます。
Zp1がZp2にθ回転移動するには次のことが行われます。
・ ピニオンは静止したサンギヤの周囲0~θの範囲をかみ合いながら回転する
これは次の自転運動と公転運動に分離できます。
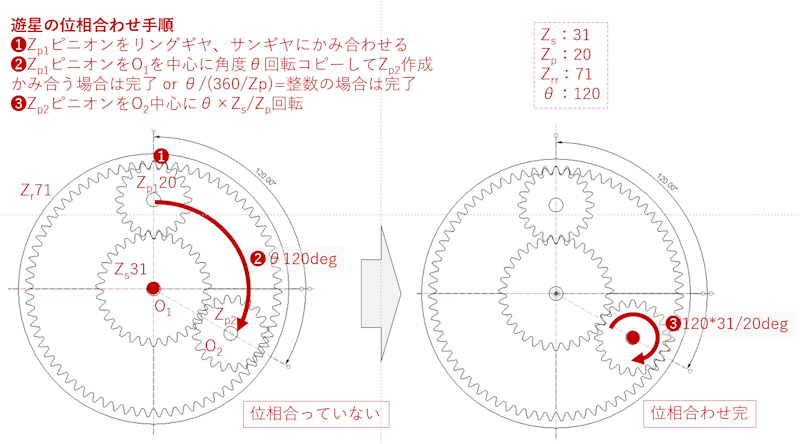
(1) サンギヤが角度-θ自転すると、ピニオンはθ×Zs/Zp自転する(それぞれの軸は動かない自転運動)
(2) サンギヤとピニオンがセットになって角度θ回転する(ピニオン軸が回転する公転運動)
以上に基づく手順が図2にも記載の次の❶❷❸です
❶Zp1ピニオンを12時位置でリングギヤ、サンギヤにかみ合わせる。
わかりやすくなるようにピニオンの12時位置を歯部とする。
❷Zp1ピニオンをO1を中心に時計方向に角度θ回転コピーしてZp2ピニオン作成
この時点でピニオンは時計回りθ回転の自転
❸Zp2ピニオンをO2中心にθ×Zs/Zp回転
この時点でピニオンはθ+θ×Zs/Zp=θ(1+Zs/Zp)回転
注意
1番目のZp1から2番目のピニオンZp2を作る際、今回は回転コピーを使ったので、そこにはθの自転が含まれていました。もし、回転コピーでなく移動コピーを使うと、回転成分は含まないので、最後の自転計算でθ(1+Zs/Zp)にする必要があります。